Hongji Liu
Ph.D. candidate in Robotics and Autonomous Systems, HKUST

I am a Ph.D. candidate from The Hong Kong Univerisity of Science and Technology at the Robot Motion Planning and Control Lab under the supervison of Prof. Jun Ma, and also at the Robotics and Multi-perception Lab in Robotics Institute, under the supervision of Prof. Ming Liu and Prof. Qifeng Chen. I received my bachelor's degree in Software Engineering from Sun Yat-sen University in 2019.
My research interests mainly include high-definition maps, semantic mapping, robot state estimation, and SLAM (Simultaneous Localization and Mapping), mainly applied to autonomous driving and robotics.
Maps play a key role in indoor robots, autonomous vehicles and other robotics derived applications. Maps with complete functions, easy storage and high accuracy are very important for robot perception, localization and planning. Therefore, I am devoted to exploring efficient and accurate map expression forms applicable to robots in different application scenarios and tasks. It is expected to take the map as the link to help improve the performance of the robot in different application scenarios.
Selected publications
-
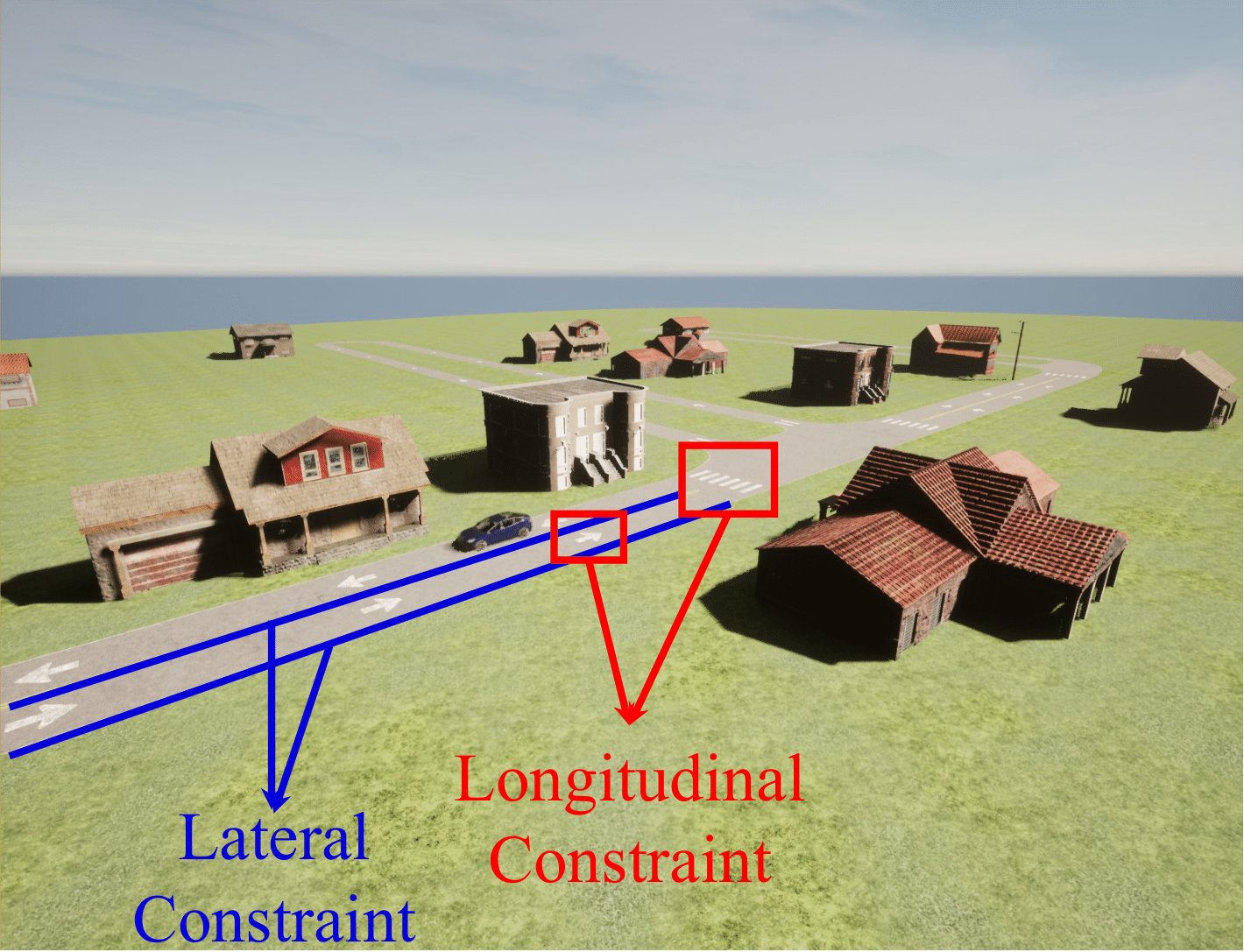
 Enhance Inverse Perspective Mapping for Automatic Vectorized Road Map GenerationUnder Review , 2025
Enhance Inverse Perspective Mapping for Automatic Vectorized Road Map GenerationUnder Review , 2025