Enhancing Campus Mobility: Achievements and Challenges of Autonomous Shuttle “Snow Lion”
Yingbing Chen,
Jie Cheng,
Sheng Wang,
Hongji Liu,
Xiaodong Mei,
Xiaoyang Yan,
Mingkai Tang,
Ge Sun,
Ya Wen,
Junwei Cai,
Xupeng Xie,
Lu Gan,
Mandan Chao,
Ren Xin,
Ming Liu,
Jianhao Jiao,
and Lujia Wang
IEEE Robotics and Automation Magazine (RAM)
, 2024
The rapid evolution of autonomous vehicles (AVs) has
significantly influenced global transportation systems.
In this context, we present ``Snow Lion'', an autonomous
shuttle meticulously designed to revolutionize on-campus
transportation, offering a safer and more efficient mobility
solution for students, faculty, and visitors. The primary
objective of this research is to enhance campus mobility by
providing a reliable, efficient, and eco-friendly transportation
solution that seamlessly integrates with existing infrastructure
and meets the diverse needs of a university setting. To achieve
this goal, we delve into the intricacies of the system design,
encompassing sensing, perception, localization, planning, and
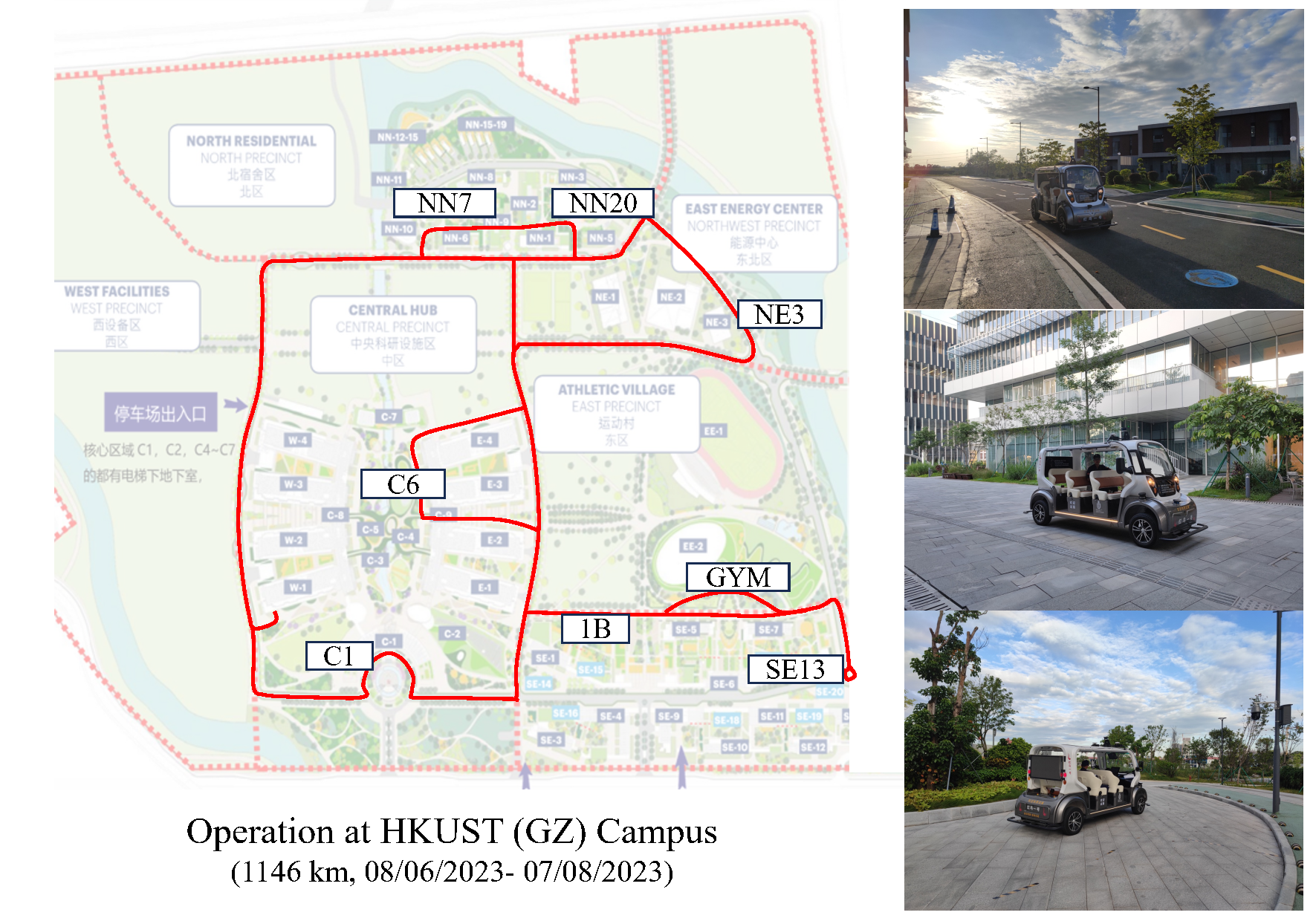
control aspects. We evaluate the autonomous shuttle's performance
in real-world scenarios, involving a 1146-kilometer road haul
and the transportation of 442 passengers over a two-month period.
These experiments demonstrate the effectiveness of our system and
offer valuable insights into the intricate process of integrating
an autonomous vehicle within campus shuttle operations.
Furthermore, a thorough analysis of the lessons derived from this
experience furnishes a valuable real-world case study, accompanied
by recommendations for future research and development in the
field of autonomous driving.
 Enhance Inverse Perspective Mapping for Automatic Vectorized Road Map GenerationUnder Review , 2025
Enhance Inverse Perspective Mapping for Automatic Vectorized Road Map GenerationUnder Review , 2025 GPU-Accelerated Conflict-Based Search for Multi-Agent Embodied IntelligenceUnder Review , 2024
GPU-Accelerated Conflict-Based Search for Multi-Agent Embodied IntelligenceUnder Review , 2024 Energy-limited Lifelong Multi-Agent Pickup and DeliveryUnder Review , 2024
Energy-limited Lifelong Multi-Agent Pickup and DeliveryUnder Review , 2024 Constraint-Based Hand-Eye Calibration for Large-Scale Intelligent Guided VehiclesUnder Review , 2024
Constraint-Based Hand-Eye Calibration for Large-Scale Intelligent Guided VehiclesUnder Review , 2024 MGCBS: An Optimal and Efficient Algorithm for Solving Multi-Goal Multi-Agent Path Finding Problemthe 33rd International Joint Conference on Artificial Intelligence (IJCAI) , 2024
MGCBS: An Optimal and Efficient Algorithm for Solving Multi-Goal Multi-Agent Path Finding Problemthe 33rd International Joint Conference on Artificial Intelligence (IJCAI) , 2024